
This post is a bit late given the launch was two months ago, but hey, I’ve been busy. We had a baby last year, and I’m moving to the US this month.
Launch day, site, people
We launched on Sunday February 24th from Steve Randall’s site in Elsworth, UK. Steve (obviously) came out to meet us, and supplied the balloon and helium (and in the end the parachute too).
Helping me out on launch day was Marcus Daniels (driver) and Noel Vasquez (comedy).
Payloads
- Trusty old tracker “EAGLE” through it’s third flight. Only real modification is that I removed the Canon A810 camera given that it doesn’t produce very good photos, which saves weight (~170g) for other payloads. 315 grams. RTTY signal at 50 baud 8-N-2.
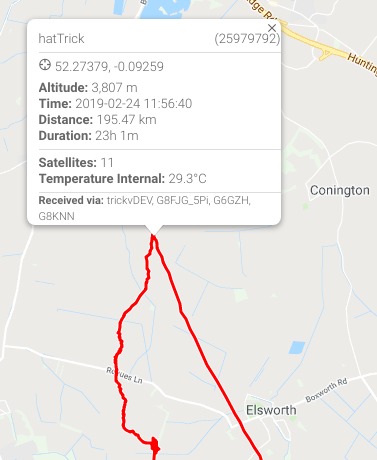
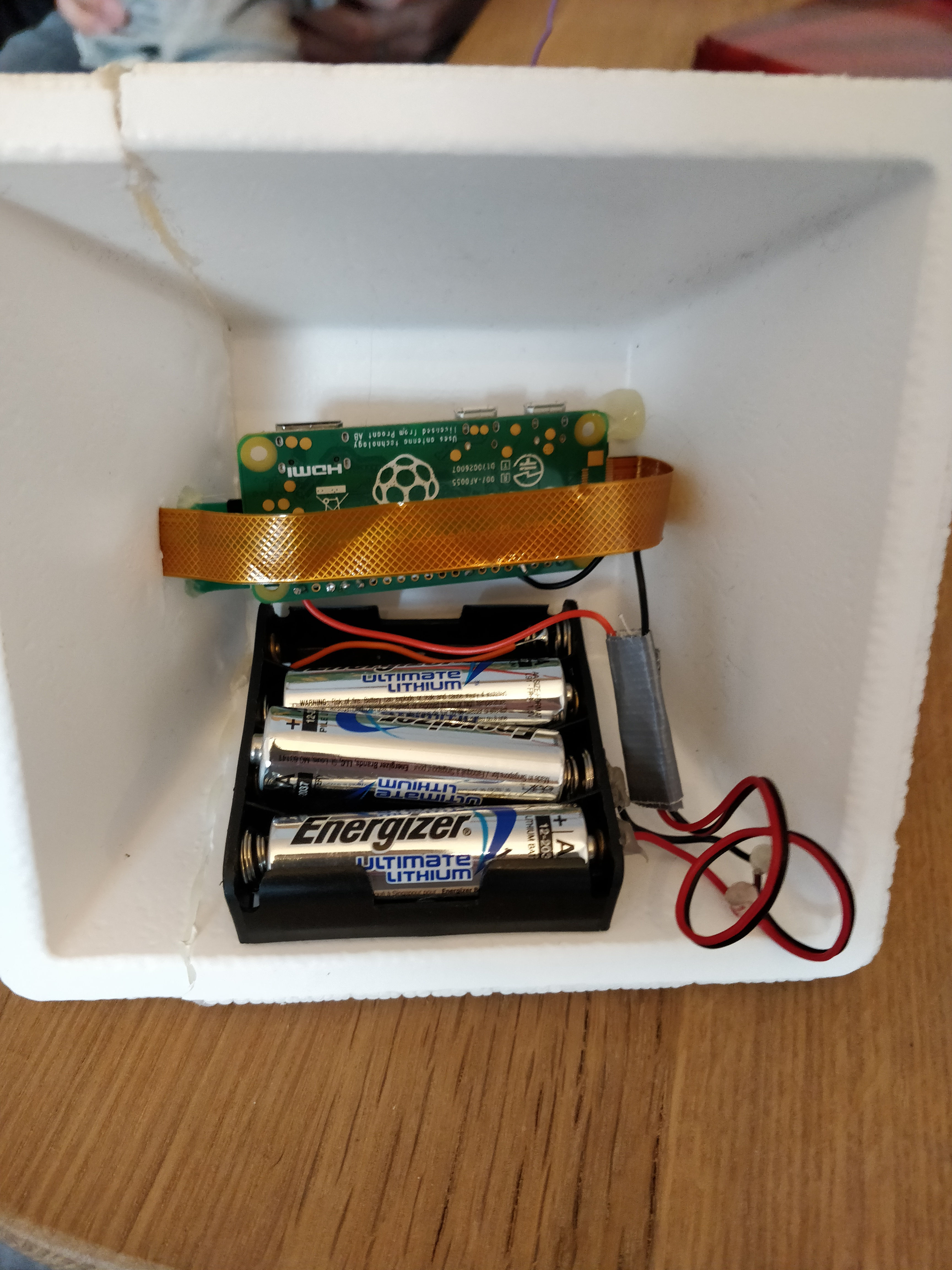
- New tracker named “hatTrick” given it’s my third flight. It’s a Pi Zero build of Dave Akerman’s “DIY Lightweight Pi Tracker” built pretty much to the letter but with my own cheap case made of an old ice cream styrofoam box. I used 3xAA batteries with no voltage regulator. 94 grams with the box! Not bad. LoRa mode 1 signal w/ SSDV.
- “hiadsb” – a revisit of my last flight’s “see how far away I can receive ADS-B signals” experiment. I used a different battery pack this time, and added a cantenna ground plane to the el-cheapo nooelec ADS-B antenna. 179 grams.
- Steve Randall’s X2 tracker + a GSM backup tracker which he wanted to try.
Balloon & such:
- Balloon: 1200G of a new brand that Steve wanted to try (I didn’t get the name.)
- Parachute: 36″ PML Durachute
- Neck lift: 2.4kg
See my weight tracking sheet for reference if you’re curious how I plan for this leading up to a launch.

Launch planning challenges
February in SE England isn’t a great time to launch. Winds shift regularly and often blow quite strongly sending any payload into the sea. At one point a few days leading up to the launch, we were convinced the launch would have to be postponed given the following options for a Saturday or Sunday launch:
My original idea was to use an 800g balloon for a slightly shorter launch staying a bit further inland. However the night before the launch the predictions shifted again, and put a 800g balloon landing exactly on Runway 22 of Stansted airport. Bad idea! If we launched a bit earlier, instead of Stansted we’d land in Braintree. Bad idea again. 12 hours later (a mere 4 hours before launch), the predictions shifted yet again and gave us an opening. Steve suggested to use a big balloon (1200g) to keep the payload afloat a lot longer and put it down south of Colchester.
Chase
The chase was fun because as you can see from the photos, it was a beautiful day. We watched the balloon ascend to a few thousand meters.

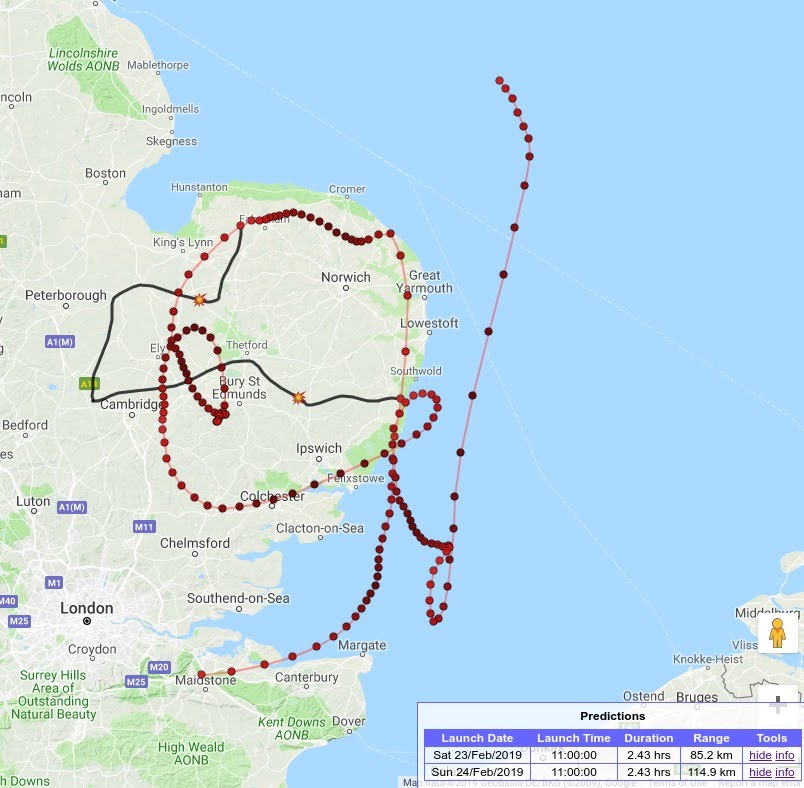
At some point we lost track of the balloon visually. Why? Because we didn’t look at our prediction nor the azimuth on the tracker UI. At 3800m the balloon hit a different layer of atmosphere and did an abrupt U-turn:
I sat in the passenger seat and gave directions to Marcus, whilst also tracking my balloon on both LoRa (using a Pi via network cable with a LoRa radio on it) and RTTY (via a SDR in my laptop). Tracking both simultaneously wasn’t as hard as I’d thought, but I did have trouble keeping two antennas mounted on the roof. In the end I just used one antenna and switched back and forth between the two trackers but I had plenty of listeners. Sadly I hadn’t announced Steve’s X2 tracker so not many people knew to tune in.
I also plugged a USB GPS receiver into my laptop to provide dl-fldigi with a GPS location source so I could show my position on the tracker website in real-time as I received data. This worked well until the GPS receiver died. It’s since been declared dead. It was a cheap enclosure of a uBlox 7 chip.
Burst
New altitude record for me: 34,000 meters! We were aiming for 32km. Every meter up we went was another meter closer to a wet landing, so when we started to rise above 32km I started to sweat more. But we hit a nice high altitude and stayed dry. PHEW.
Recovery
Lucky me. We landed 20m from a road, in a field, plain sight. Double lucky, I think the payload train missed a tree near the landing site probably by a few meters.
Good thing, because not only did I have one tracker failure on landing, but two!
Steve drove faster than we did and was waiting for us at the landing site.
We landed about 3500m from the water.
What worked & what didn’t
Success: SSDV
I can’t take any tech credit for this as it’s all Dave and the PITS software which runs on it. But it worked and sent back some great photos which was fun for family to watch as the flight went on.
Double-fail: Battery packs on landing
I’ve read over and over about people soldering batteries, which sounded like over-engineering. Until this time!
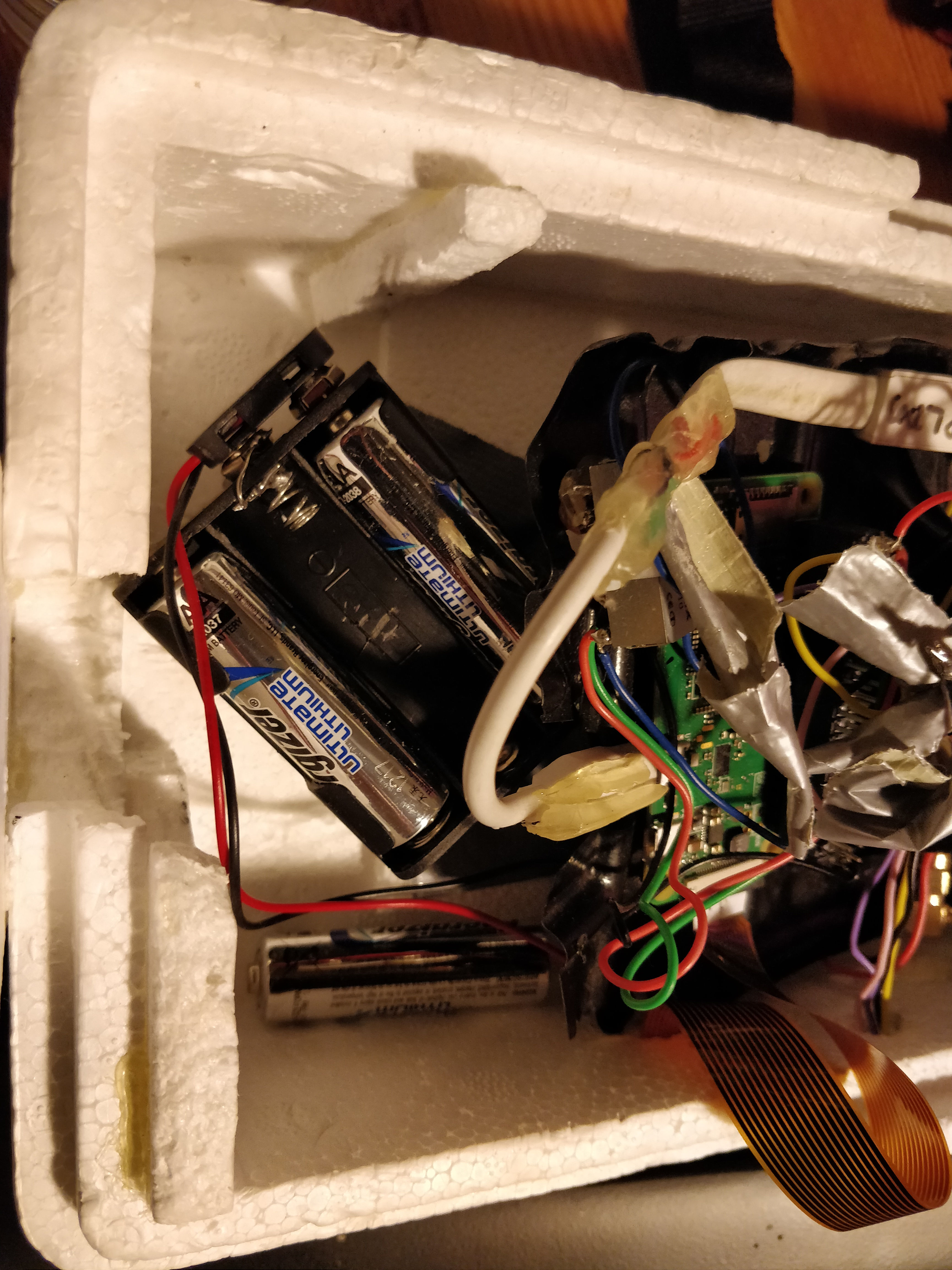
Epic fail: hiadsb ADSB experiment
This payload died entirely and presumably in spectacular fashion. The Pi Zero that it ran on is dead – fried. The SD card is fried too – nothing will read it anymore. My suspicion? The cheap battery pack that I flew (which I’ve never tried frozen) must have a bad voltage regulator in it and it fried the Pi. Unfortunately this led to zero data coming back. Sad.
Fail: BME280 sensor on EAGLE
It failed on the last flight, why would I expect it to work this time without me fixing it?
Other things I learned
- Payload prep is something I should do more of at home. Have the payloads with good fresh batteries ready to go, and have a way to quickly seal them up to launch quicker. We arrived at the launch site around 10:20 and didn’t launch until about 11:45 which, on a day where the winds were against us, meant a very different landing site.
- Bring lunch. Stopping for lunch wastes valuable time. One day I’d like to see a payload land, but you’ve gotta drive efficiently to get there.
- Mag mount antennas need testing at high speeds.
- PITS low resolution photos on the ground mean low resolution photos on disk. Which means you get crap resolution photos of liftoff. While this is good for SSDV not great for post analysis. I might look into fixing this or next time send full size photos on the ground.
- PITS only takes photos by default once per minute. I never thought much of this, but it’s not very often.
Photos & video
OK, here’s what you came here for:
- Photos from EAGLE (IGNORE the telemetry data in the corner, it’s WRONG)
- Photos from hatTrick
- Launch footage from Steve’s drone
- Launch footage from Marcus’s mobile phone
Post launch battery rundown
After bringing the payloads home and making copies of the data, I put the used batteries back in and ran each of the trackers to exhaustion to get an idea of how much battery life was left in them. They were powered on for about 4 hours, and each had plenty left to spare: EAGLE 16 hours, hatTrick 10 hours.
Radio listener analysis
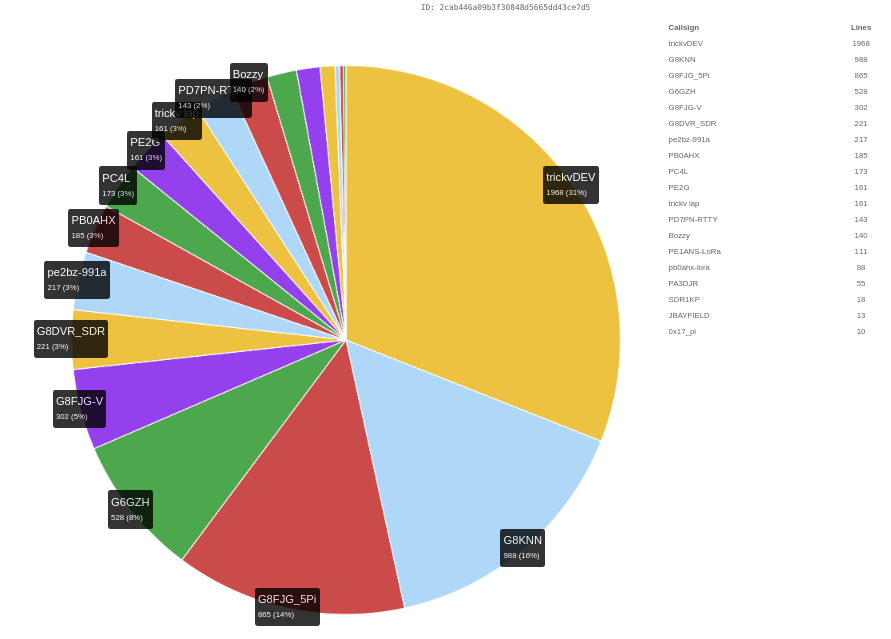
Finally I win! All I had to do was track my own balloon.
Further analysis
Still need to figure out what happened with the BME280 sensor. That’s weird.
I would like to spend more time analyzing the ascent and descent velocities, especially somehow visualizing them vs. altitude.
I don’t know how to get a link to the telemetry data on habhub.org now that the launch is a bit old. It’s like my data has been archived even though this was a “live” flight.
My photos from EAGLE have the wrong telemetry data on them. Looking at it now two months later, I think I’ve substituted data from my launch in May 2018! That would explain it. Unfortunately I’m tired and don’t have easy access to my HAB data archives at the moment, so this’ll have to wait for another day/month/never.
What’s next?
- Fix some things
- Maybe a first US launch when I arrive back there?
- Maybe another similar launch in the UK in June when I visit